
Carbot
 email
email This page
This page in English

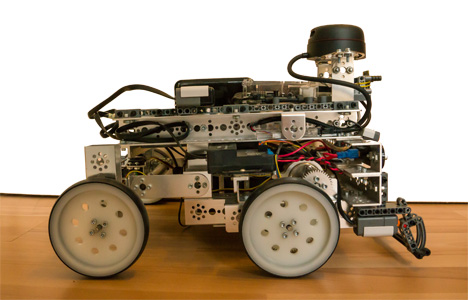
Carbot ist ein autonomer, mobiler Roboter und bietet eine Plattform zur Entwicklung von Verfahren und Algorithmen zur autonomen Robotik. Die Entwicklung des Carbots (komplett an der Fakultät Informatik, TH Nürnberg) geht bis in das Jahr 2013 zurück. Ziel war es, eine Hardware, mechanische Plattform und Software-Plattform zur Verfügung zu stellen, mit der grundlegende Verfahren der mobilen Robotik untersucht werden können. Als Besonderheit soll sich Roboter sowohl wie ein Automobil bewegen, aber auch auf der Stelle drehen können. Wegen der ersten Eigenschaft erhielt das Vorhaben seinen Namen Carbot. Er wiegt 4,7 kg, nimmt eine Grundfläche von 35 cm x 40 cm ein und hat eine Höhe von 27 cm. Er kann sich mit bis zu 31 cm/s fortbewegen. 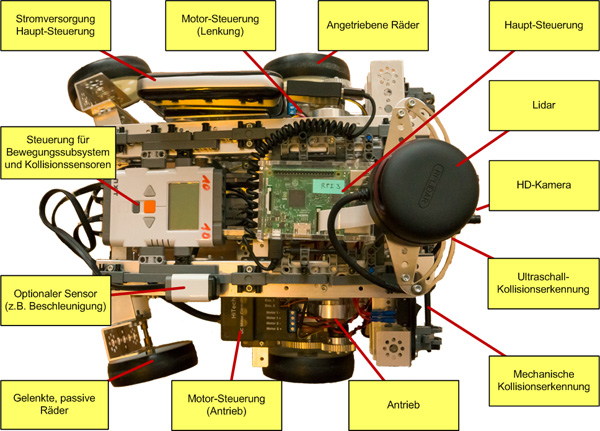
Carbot ist zurzeit in der Lage, einfache Fahrbefehle auszuführen (vorwärts, rückwärts, drehen, Kurvenfahrten) und besitzt eine Hindernis-Erkennung (mechanisch und mit Ultraschall). Über eine HD-Kamera kann das Bild in Fahrtrichtung aufgenommen werden. Darüber hinaus misst ein 360°-Laser-Scanner die Entfernung zu Objekten bis zu 6 m mit cm-Genauigkeit. Damit kann er eine Karte der Umgebung aufbauen. Komponenten zur Navigation und Bahnplanung erlauben es, Ziele auf möglichst kurzem Weg über effiziente Bewegungen anzufahren. 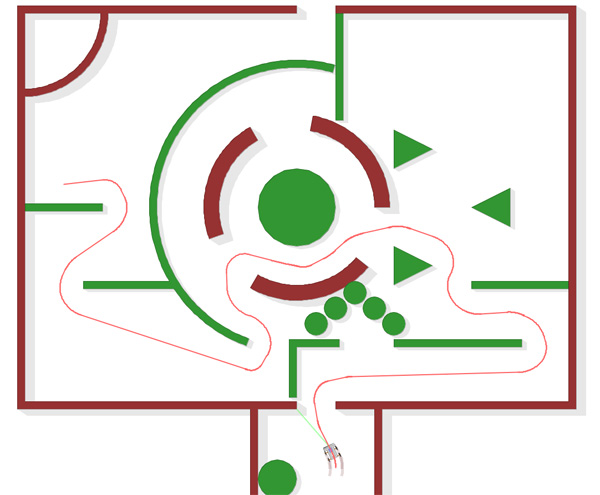
Neben dem eigentlichen Roboter gibt es für die Entwicklung und Tests eine Simulationsumgebung. Diese soll die Realisierung von Steuerprogrammen für den Carbot erleichtern, da man einen Testlauf sofort am PC ausführen kann. Darüber hinaus kann man beliebige virtuelle Umgebungen einrichten, die in der realen Welt sehr viel Aufwand kosten würden. Die Simulation ist so exakt, dass das Steuerprogramm keinen Unterschied wahrnimmt. 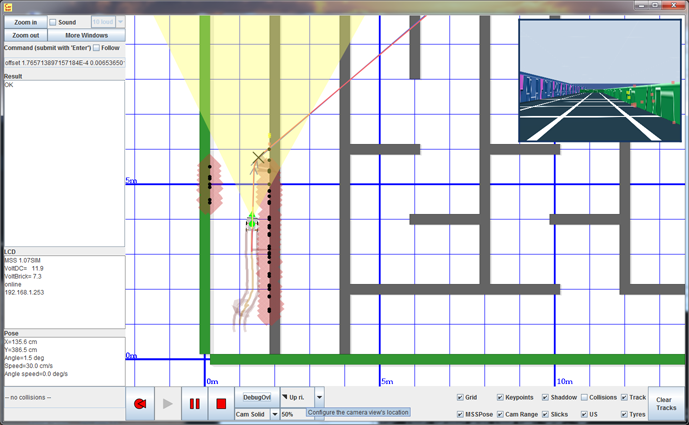
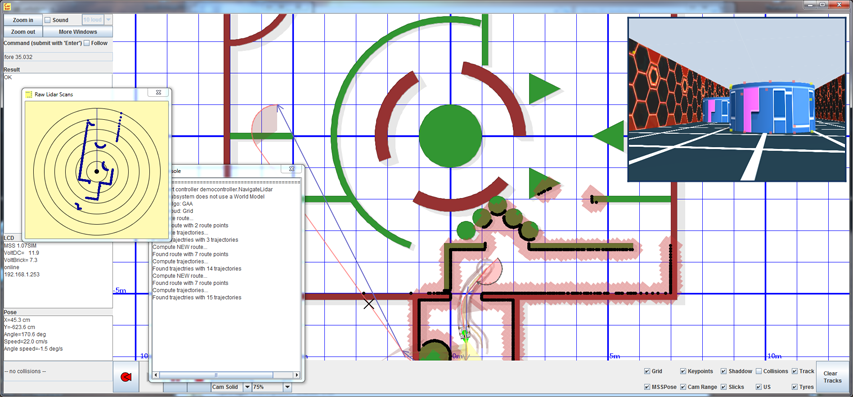
Dieses Video zeigt den Simulator bei einer Navigationsanwendung. |